AC controller
On this page you will be introduced to the AC controller, developed by SCA CONTROL to optimally control your processes (industrial and otherwise). Specifically, the aspects that make it better than the classic PID controller are highlighted. For further information, do not hesitate to contact me.
> Introduction
PID controller is by far the most common control system in industry. The reasons are as follows:
-
It has a conceptually simple structure
-
It is capable of handling a wide range of dynamic systems with acceptable performance in terms of steady-state and transient response.
-
It is easily translatable into algorithms for digital controllers
-
It is robust to many changes in system parameters.
-
Its parameters are simple to calibrate

Presentation of the AC controller (formerly Algebraic controller) during a Talk at the Department of Information Engineering (Padua).
However, due to its simplicity and its increasingly widespread use in the context of digital control (compared to continuous control), in some cases it may present weaknesses that lead to non-optimal control (excessive actuator stress, excessive consumption of the control action...) or to the difficulty of controlling particular processes (for example processes with long "dead times"). These issues are often addressed by inserting the PID into more complex control architectures, but in turn they present potential disadvantages (greater design complexity, "tuning" difficulties, computational load, sensitivity to modeling errors...).
> Comparison with PID (base)
SCA CONTROL has developed a digital controller, the AC controller ("Algebraic-Control"), which is structurally more complex than the PID, but still manages to guarantee the outstanding characteristics of the PID. Furthermore, the greater number of degrees of freedom provides advantages for the control of industrial (and non-industrial) processes.
Numerous comparison tests between the PID controller and the AC controller have been performed. These tests demonstrate, in general, the generation of a better control action by the AC, namely that:
-
With the same architecture, in transients the AC controller generates a smoother control action
-
at the same output noise, the PID generates a noisier control action
-
a noisier control action implies higher consumption
-
The AC controller is able to control processes with long "dead times" and "lag"
-
AC controller is better with lower operating frequency (helpful to reduce computational effort)
-
The AC controller is less prone to actuator saturation.
In addition to these control law features, SCA CONTROL allows you to set up the controller by choosing user-friendly parameters, for example:
-
the "aggressiveness" of the controller, to choose a higher performing or more energy efficient control
-
the "quality" of the controller, to choose a more or less precise control in the reference transients
-
the "smoothness" of the signals processed by the controller, which is linked to the operating frequency and therefore affects the computational effort
Comparison between PID and AC controller: with the same "aggressiveness", "quality", "smoothness" and output noise, the control action generated by the PID is noisier and has an initial peak in the transient. This translates into greater stress on the actuator and higher consumption.
> Comparison with PID (advanced)
To make a meaningful comparison between the AC controller and the PID controller, it is useful to run tests for different combinations of controller parameters, namely "aggressiveness", "quality", "smoothness". These user-friendly parameters, at the controller design level, are related respectively to the step response settling time, the step response overshoot, and the relationship between the process dynamics and the operating frequency (or sampling frequency).
Below, SCA CONTROL provides you with a series of guides for a more in-depth comparison between the AC controller and the PID controller:
-
complete definition of all considered parameters:
- IT: preliminari
- EN: preliminaries
-
comparison of controllers' robustness to output moise:
- IT: analisi_rumore
- EN: noise_analysis
-
consumption required by controllers:
- IT: analisi_consumo
- EN: consumption_analysis
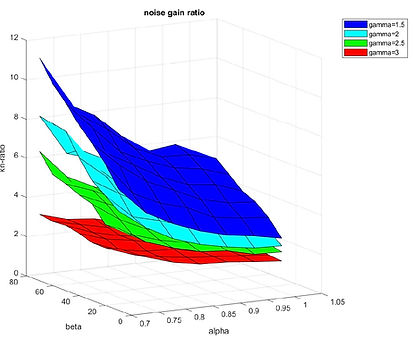
Comparison of the output noise robustness of PID controller and AC controller: for the same specifications, the noise gain of PID is higher than that of AC, so PID is less robust.
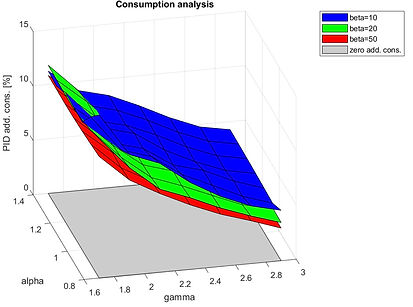
Comparison of PID and AC controller consumption, analyzing the control action energy: with the same specifications, PID consumption is higher than AC.